 掃一掃,立刻溝通
掃一掃,立刻溝通
在汽車(chē)制造、工程機(jī)械等行業(yè)持續(xù)走向“小批量、多品種”的柔性化生產(chǎn)趨勢(shì)下,產(chǎn)線(xiàn)對(duì)自動(dòng)化程度與靈活性的要求顯著提升,自動(dòng)上下料等關(guān)鍵環(huán)節(jié)對(duì)視覺(jué)識(shí)別能力、路徑規(guī)劃算法和快速換型能力提出更高要求。
無(wú)序抓取為何“難落地”?

在工業(yè)現(xiàn)場(chǎng),物料通常以堆疊、混放、遮擋、反光等狀態(tài)存在,無(wú)序抓取通常面臨四大“落地難題”。
1.抓不準(zhǔn),也抓不穩(wěn)
工件堆疊無(wú)序、遮擋嚴(yán)重增加識(shí)別難度,路徑規(guī)劃缺乏避障機(jī)制,易出現(xiàn)誤抓、漏抓,影響節(jié)拍穩(wěn)定性和清框效率。
2.抓不全,還抓不快
柔性工件、非規(guī)則結(jié)構(gòu)、動(dòng)態(tài)堆疊形態(tài)工件識(shí)別困難,節(jié)拍控制不穩(wěn),效率難以保障。
3.切換慢,又難維護(hù)
產(chǎn)品種類(lèi)頻繁更替,每次換型需反復(fù)調(diào)參、重建工具鏈,工程部署復(fù)雜,維護(hù)成本高。
4.AI門(mén)檻高,難落地
模型訓(xùn)練、數(shù)據(jù)標(biāo)注依賴(lài)專(zhuān)家,客戶(hù)難以自主運(yùn)維,系統(tǒng)復(fù)制難、交付周期長(zhǎng)。

凌云光打造全新升級(jí)3D無(wú)序抓取方案,通過(guò)抓取精度突破、路徑規(guī)劃進(jìn)化、AI訓(xùn)練平臺(tái)升級(jí),實(shí)現(xiàn)小于0.5mm抓取精度,穩(wěn)定應(yīng)對(duì)多目標(biāo)、堆疊、遮擋等復(fù)雜場(chǎng)景,節(jié)拍穩(wěn)定,在高反光、油污等惡劣環(huán)境中穩(wěn)定運(yùn)行,在汽車(chē)門(mén)、沖焊件、發(fā)動(dòng)機(jī)總成、零部件等多個(gè)復(fù)雜抓取場(chǎng)景成功應(yīng)用,幫助客戶(hù)實(shí)現(xiàn)從“能抓”到“看得清、抓得穩(wěn)、換得快、訓(xùn)得易”躍遷,助力柔性化產(chǎn)線(xiàn)智造升級(jí)。
依托自研VisionWare視覺(jué)算法平臺(tái),融合AI與點(diǎn)云匹配算法(如PPF、ICP),在精度、速度與環(huán)境適應(yīng)性方面實(shí)現(xiàn)顯著提升,有效支撐多品類(lèi)柔性上料、多目標(biāo)動(dòng)態(tài)抓取等需求場(chǎng)景。
高精度識(shí)別與空間定位
復(fù)雜工況適應(yīng)性強(qiáng)
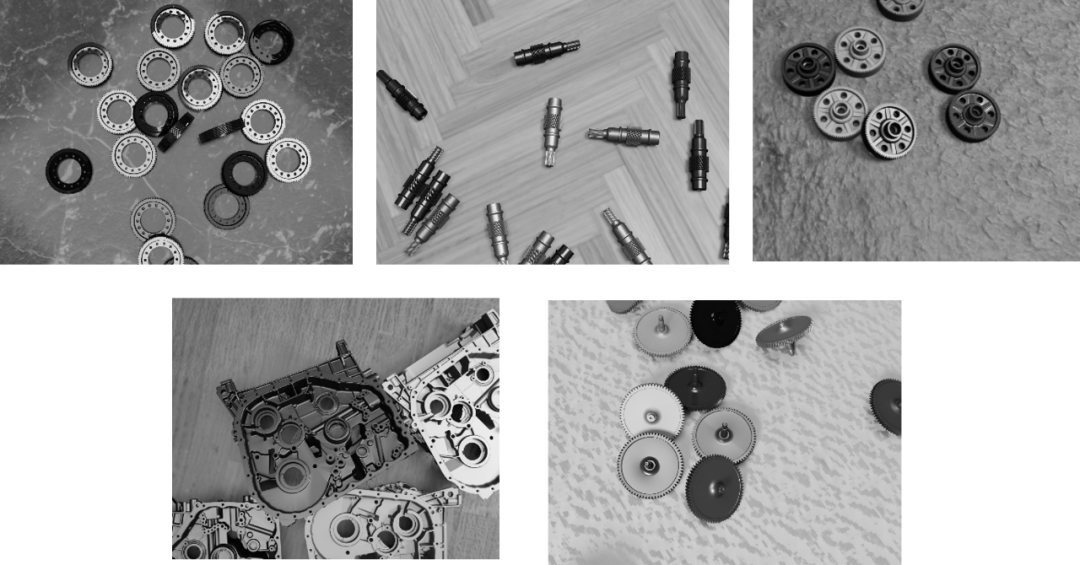
一套模型,識(shí)別多類(lèi)物體

▲多目標(biāo)匹配效果
具有六軸機(jī)械手初始位姿到目標(biāo)位姿的無(wú)碰撞可行路徑計(jì)算功能,確保機(jī)械臂本體、執(zhí)行器與障礙物、實(shí)時(shí)點(diǎn)云之間不會(huì)出現(xiàn)碰撞,確保在堆疊混放等復(fù)雜環(huán)境中穩(wěn)定運(yùn)行。
多姿態(tài)自適應(yīng)
自動(dòng)判斷最優(yōu)夾持姿態(tài)與路徑,支持多抓取點(diǎn)位輸入,自動(dòng)規(guī)劃出一條最優(yōu)抓取路線(xiàn)。
動(dòng)態(tài)避障路徑
根據(jù)工況實(shí)時(shí)規(guī)劃,規(guī)避工裝、物料遮擋,對(duì)于深框場(chǎng)景,可自動(dòng)規(guī)劃出最優(yōu)無(wú)碰撞的抓取路線(xiàn),規(guī)劃成功率可達(dá)100%。
抓取容錯(cuò)機(jī)制
異常信號(hào)觸發(fā)防撞邏輯,保護(hù)設(shè)備與物料,提升系統(tǒng)長(zhǎng)期運(yùn)行穩(wěn)定性。
一站式AI訓(xùn)練平臺(tái),打通從STL模型導(dǎo)入到模型部署的完整流程,實(shí)現(xiàn)AI從“難用”到“易用”的轉(zhuǎn)變。
采用仿真訓(xùn)練無(wú)需現(xiàn)場(chǎng)采圖和人工標(biāo)注,5分鐘配置 + 5小時(shí)訓(xùn)練部署,交付效率提升3倍
自動(dòng)生成COCO數(shù)據(jù)集,內(nèi)嵌增強(qiáng)/預(yù)處理/標(biāo)注流程
兼容人工標(biāo)注與仿真數(shù)據(jù),支持不同客戶(hù)能力與數(shù)據(jù)環(huán)境,適配多場(chǎng)景訓(xùn)練

▲仿真訓(xùn)練

?

某新能源汽車(chē)電動(dòng)總成整線(xiàn)

抓取對(duì)象:高反光金屬件、暗色塑料件等
工況特點(diǎn):堆疊無(wú)序、材質(zhì)反光、物體混放、有油污或異物
生產(chǎn)要求:節(jié)拍≤2s,支持10種部件快速切換
客戶(hù)反饋:
“產(chǎn)品堆得亂七八糟的,系統(tǒng)居然都能抓干凈,一點(diǎn)不剩。”
“每天的生產(chǎn)計(jì)劃都變,這套系統(tǒng)能跟著產(chǎn)品快速切線(xiàn),太省心了。”
“我們是奔著全自動(dòng)化去的,系統(tǒng)穩(wěn)定運(yùn)行一年多了,沒(méi)有掉過(guò)鏈子。”

